Work and Energy
Slides
Conservation of Energy Worksheets
*g = 10 m/s/s for the Individual Cart Energy WS
*There is only friction at the bottom of the ramp
*There is only friction at the bottom of the ramp
*Use g = 10 m/s/s for the 'Energy of Projectile Motion Worksheet 1'.
*Use g = 9.8 m/s/s for the 'Energy of Projectile Motion Worksheet 2'.
*Use g = 9.8 m/s/s for the 'Energy of Projectile Motion Worksheet 2'.
Work & Energy Review Assignments
Tutoring
Individualized Quizzes
AP Energy White Board Problems
The Beauty of Work (from E2:11 #2)
Individual Work Activity Helpful Hints
Superbowl Physics and Mass WS Solutions
E2:20 and E1:22 Solutions
E2:14 Solutions
E2:17 Solutions
E2: 15 & 16
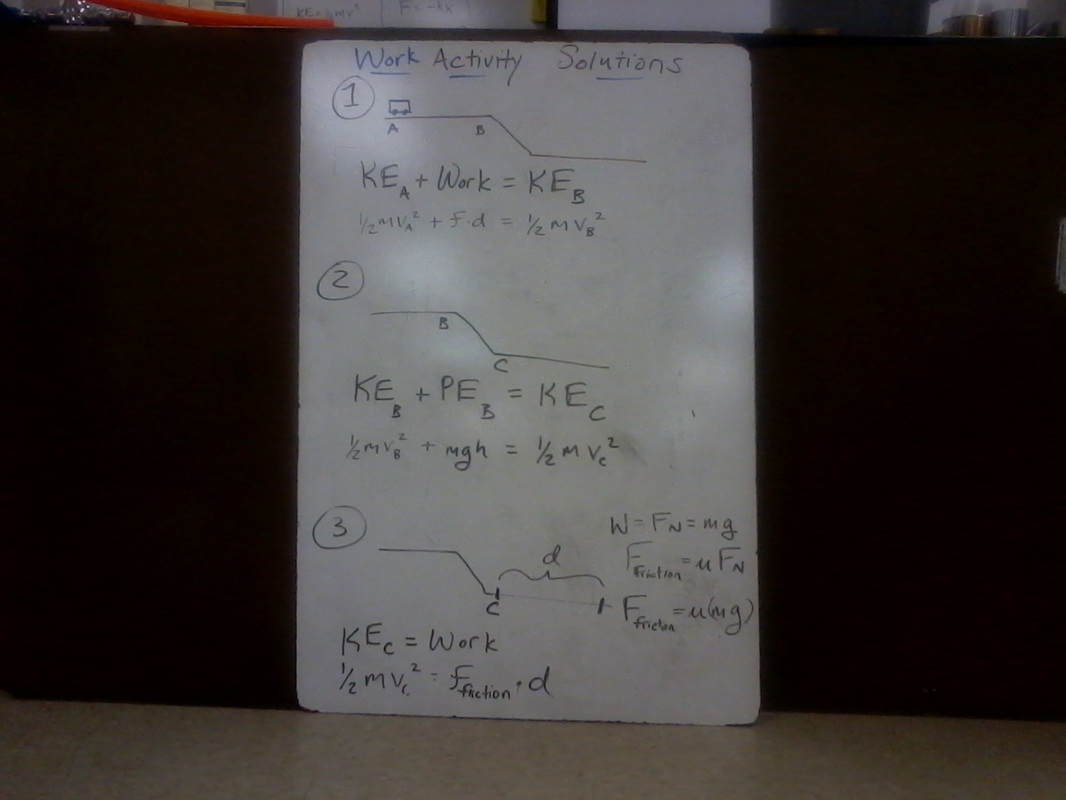
Car Energy Worksheet Solutions
Side 1:
Part A. (sin15)*(90) = 23.29 meters
Part B. KE(initial) = KE(final) + PE(final) + Heat(or work)
Part C.
.5*500*(30^2) = .5*500*(V^2) + 500*10*23.29 + 600*90
V=15 m/s
Side 2:
Part A. (sin15)*(90) = 23.29 meters
Part B. KE(initial) = KE(final) + PE(final) + Heat(or work)
Part C.
.5*500*(30^2) = .5*500*(V^2) + 500*10*23.29 + 600*90
V=15 m/s
Side 2:
Work and Energy Tutorials
Washington State Mudslide
The Physics of Automobiles: Power, Tangential Velocity, Angular Velocity, Mass, Weight, Force, Acceleration, Lateral g's, Friction, Torque
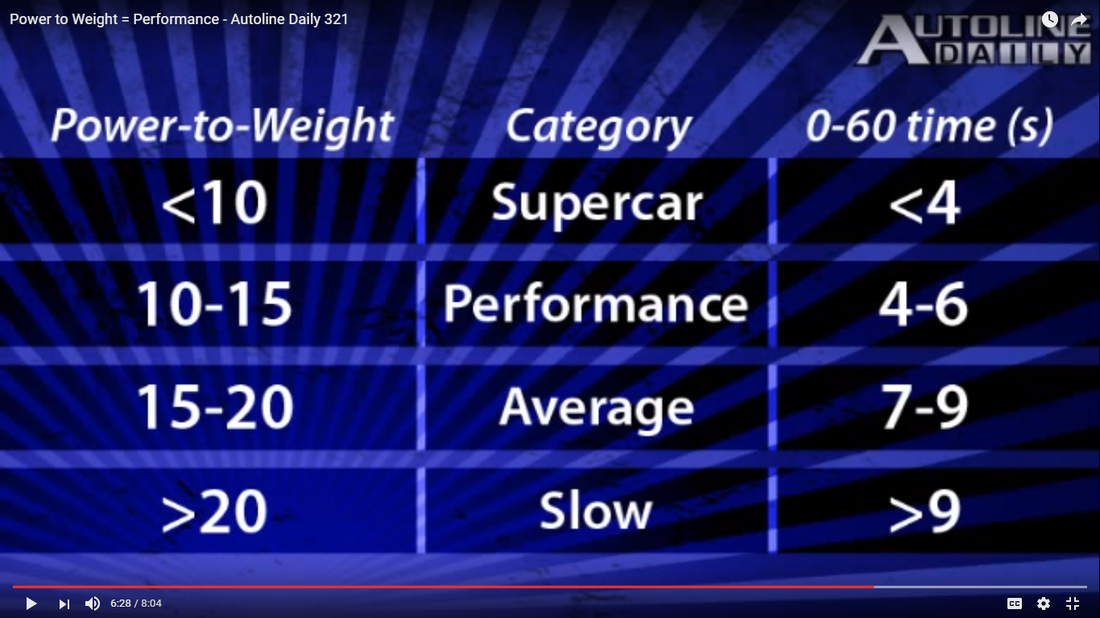
Weight to Power Ratio:
Acceleration is proportional to Power/(Mass*Velocity). Greater power leads to greater acceleration; greater mass leads to less acceleration; and acceleration is lower at higher velocities. This equation can be derived by setting two equations equal to one another and solving for 'a': F = P/V and F = m*a. Cars may be classified by their power to weight ratios. Weight is simply the mass of the vehicle multiplied by the acceleration of gravity which is 9.8 m/s/s on planet earth. The weight to power ratio can be expressed as a fraction: (Weight/Power). Cars with a ratio lower than 10 are considered super cars. Sometimes people use the power to weight ratio instead of weight to power, but the overall logic is the same. The Koenigsegg ONE: 1 has nearly a 1:2 ratio with 1341 horsepower and 2998 lbs of curb weight with a top speed of 273 mph. The ONE:1 is power to weight ratio in Horsepower to kilograms rather than horsepower to american pounds of weight.
When accelerating at low speed, the weight to power ratio is the most important factor. Two cars with very different masses, but the same power to weight ratio will accelerate at the same speeds when initial speed is low. As speed increases, traction limited grip plays an increasingly important role. The lighter (less massive) car will accelerate more in mid range speeds because of the downward force from air increases its force normal (think friction equation which is the source of thrust forward) at a higher rate as compared to the heavier car. Both cars have the same increase in downward force from air because their overall shape is likely the same, but percentage by which force normal increases for the lighter car is greater as compared to the heavier car. Force thrust is equal to force friction which is mu*force normal.
At the very high end speeds, the heavier car will have greater acceleration than the lighter car. The net force on each of the cars is thrust (aka friction from the tires on the ground) minus drag. The drag on both cars is the same, however the thrust force is greater for the heavier car than the lighter car. The heavier car must have greater engine power if it achieved the same weight to power ratio as the lighter car. Therefore the drag affects the net force at differing rates when the lighter car has a greater overall decrease in its net force resulting in less acceleration. Students may need to draw a force diagram for both cars and think about newton's second law a = (net force)/mass to understand this at a deeper level.
Explaining Transmissions using P=force*velocity (aka linear kinematics):
Start with the formula a=(f/m) . Force and acceleration are directly proportional. Given the same mass, acceleration increases as force increases. For example, doubling force leads to double the acceleration. Second, consider the power equation Power=Force*Velocity and apply it to gears in a transmission. The V represents tangential velocity of a gear (not the angular velocity). For simplicity we will assume the power of an engine remains constant, therefore as we apply the formula power will stay the same while force and velocity vary inversely.
Linearly Linked Gears. Each gear in a linearly linked set of gears will have the same power (measured in horsepower or watts). If the gears are linearly linked, each gear (regardless of radius) travels at the same tangential velocity although angular velocities will vary. If tangential velocity remains constant, then the force exerted by each gear also remains unchanged. However, if you arrange the gears in compound fashion, you can vary the tangential velocity of one of the compounded gears which inversely effects force. In a transmission there is always an input and output shaft connected to the two gears that are linearly linked, these shafts are a form of compound gear.
Compound Gears. The two adhered gears that comprise a compound gear have the same angular velocity, but they differ in tangential velocities. In a compound gear, the larger gear has greater tangential velocity and less force as compared to the smaller gear to which it is adhered. By compounding two gears and keeping power constant, you can increase the tangential velocity of a gear by a certain factor and thereby reduce its force by that same factor. Compound gears can be arranged such that the power input first enters a large gear and is transferred to a smaller gear to which it is adhered--this results in more force but less velocity. For example, since power is constant, cutting the velocity in half of a a gear by compounding two gears with ration 1:2 results twice the force or P=(1/2*V)*(2*F). Compound gears can also be arranged such that the power input first enters a small gear and is transferred to a larger gear to which it is adhered--this results in less force but more velocity. An example of this would be doubling the velocity of a gear by compounding two gears with ratio 2:1 which results in half the force or P=(2*V)*(1/2*F).
Three scenarios:
Scenario 1: A large gear is linearly linked to a large gear compounded with a small gear results in lower velocity, but greater force. Due to the smaller radius of the compounded gear, the velocity is smaller (smaller circumference distance traveled in the same time) but the force is greater.
Scenario 2: A large gear is linearly linked to a large gear which is in turn linearly linked to a third large gear (tangential velocities remain constant for all gears) .
Scenario 3: A large gear is linearly linked to a small gear compounded to a large gear results in higher velocity, but less force. Due to the larger radius of the compounded gear, the velocity is larger (larger circumference distance traveled in the same amount of time).
Internal combustion engines have a limited RPM (RPM is the same as angular velocity). Transmissions begin with Scenario 1 to maximize acceleration. However, when acceleration is high due to a large force, the engine will reach its maximum RPM very quickly. Scenario 2 is the next transmission stage where the RPM of the engine is the same as the velocity of the gears. Scenario 3 occurs at higher speeds when force is still desired so as to continue accelerating the car; only a small amount of force is available due to the RPM limit of the engine. However, some force is better is no force. Ideally, if there were no RPM limit on an engine, we would always want scenario 1 such that force and acceleration are high.
Torque can have several meanings depending upon the context (or equation) due to its unit: force*displacement. The displacement could be either the lever arm length (when torque is the twisting force type) or the distance over which a force is applied (when torque is the energy type). The units of torque are Nm (energy), Nm (twisting force), foot*pounds (energy), or pound*feet (twisting force). Car magazines report torque as the twisting force type along with an rpm range in which that torque remains relatively constant. Pound*foot and Nm represent torque as a twisting force: one Newton (or lb) of force is applied perpendicular to a lever at a displacement of one meter (or foot) from the fulcrum. No movement is necessary if considering torque as only a twisting force. Movement is necessary when torque is used to describe energy or work. The unit foot*pound and Nm represents torque as work. Only a few times have I seen Torque used to describe the total energy of one combustion cycle in Joules rather than the number of newtons applied over one meter of displacement.
Work is the same as energy and is measured in Joules which also has unit of Nm or foot*pound. Work (f*d) can have the same unit of Nm or foot*pound. The term 'torque' is also used as a unit of work (aka energy measured in Joules), specifically describing the amount of work performed during one combustion cycle. The fly wheel or crank shaft travels 360 degrees (6.28 radius or radians) in one combustion cycle, torque (a certain number of lbs applied for 1 foot) must be multiplied by 6.28 feet (the total circumference of an imaginary fly wheel of radius one foot) in order to determine the total energy of a single combustion cycle. Energy divided by time is power. If you multiply the total energy of one cycle by the number of cycles occurred (revolutions) you get total energy. If you then divide that total energy by the time (per minute) it took for the number of cycles to occur, you have E/t which is power. To get specifically 'horsepower' by multiplying torque and rpm, you must also multiply by a constant (1/5252). Torque (the energy type in units of foot*lbs) multiplied by RPM (revolutions per minute) multiplied by the constant (1/5252) is equal to units of horse power. One horsepower is equal to 33000 ft*lbs/minute, so HP=(Torque*RPM*6.28)/33,000 is the same as HP=(Torque*RPM)/5252. Remember that 1 Nm is equal to 1 Joule. Torque (the energy type in units of Nm or Joules) multiplied by RPS (revolutions per second) multiplied by 6.28 is equal to power in units of watts. Torque in this context should really be called Work or Energy with units of Joules. RPM is an angular velocity. When speaking of linear speed, the formula is instead power= force*velocity. An engine A with 150 Nm at 9000 rpm has the same power as an engine B with 300 Nm at 4500 rpm. Gearing can be used with either engine A or B in order to produce any desired torque / rpm ratio.
Given that the power of an engine stays constant, you want maximum force (and as a result minimal velocity) to produce maximum acceleration when a car begins at rest. In the 3D animation of transmission they do a good job using the area under a force v. distance graph to show that total energy stays the same even though there is a give and take trade off for force and distance. Don't forget that transmissions only work if there is a compound gear involved; a tire connected to an axle with a single gear is a compound gear or a compound is simply a gear joined to the input or output shaft.
Power transfer in gears can also be thought of using the Power = Torque * Revs equation where Revs is a measure of angular velocity. More on this equation further down in this reading.
Explaining Transmission with Power = Torque*Angular Velocity (aka angular kinematics):
Power = torque*angular velocity. The torque in this equation is the 'twisting force' type of torque. This is the same formula as Power=force*velocity. Be careful to note that the 'speed' is in angular speed and not tangential. Tangential speed is equal to angular speed multiplied by the radius. This follows: (torque)*(angular velocity) = (Force*r)*(angular velocity) = (Force)*(r*angular velocity) = (Force)*(tangential velocity). Omega (which looks like a lower case w) is the symbol typically used to represent angular velocity. This equation may make transmission and gears easier for students to understand once we have covered rotational kinematics. Keep in mind that the power of the system remains constant. For the same amount of power output, a diesel engine can spin at lower rpm because it has more torque, as compared to a gasoline engine which has low torque and must spin at a higher rpm. However, power output of an engine ultimately determines speed. Different gear ratios can be used to get the power to the wheels regardless of the whether torque or rpm is higher. The new mustangs have less torque but higher rpm than the new Camaros, which results in greater power. The 2016 mustang can beat the 2015 camaro in a drag race. Cars with low amounts of torque that can sustain high RPMs can compete against cars with high amounts of torque that cannot sustain high RPMs. Gearing allows for torque and RPM (aka angular velocity) to vary inversely for the same engine.
In order to simplify the explanation of transmission, we have assumed that the amount of power produced by the engine remains constant through all ranges of RPM. However, in reality, the amount of power produced by an engine is not constant as RPM increases. Torque changes when rpm changes, but not as a perfect tradeoff as expressed by power = torque*angular velocity. Engines have an upper-bound on rpm because it is difficult to achieve the same power at higher RPMs as compared to lower RPMs. The typical range of RPM is 2000 to 6000 in order to maintain a relatively constant engine output of power. Since toque varies with RPM and torque should be reported along with a specific range of rpm. rpm is that of the engine before any transmission is involved which will lead to a trade offs of the RPM of a gear and the torque of the gear depending upon the need of the vehicle.
Mechanics may try to tune a car such that the torque remains constant independent of RPM. On the dyno output, Torque (energy as lbs of force*distance of 1 ft) and Horsepower always cross at 5252 when units of RPM are used on the x-axis and Torque/Horsepower (usually torque units are on the left, hp units are on the right) are placed on the y-axis. Torque/5252 is the slope of the horsepower curve. The dyno allows the car wheels to accelerate a solid cylinder which determines Torque (Torque = angular acceleration * moment of inertia). Tuners want to flatten the torque curve so as to achieve the maximum area under the curve (which is a measure of power). If Torque (the twisting force kind) were to remain constant, RPM would be directly proportional to power. If an ideal engine doubled RPM, the engine would have double power. Maximum RPM would lead to maximum power output of the engine.
Another way to view the power and torque relationship is with Power = Torque * Revs where Revs is a measure of angular velocity. Torque increases (varies directly) with the 'displacement' of an engine. Displacement is simply the total volume of the the cylinders where the gas/air mixture combustion occurs. Revs are usually measured in revolutions per minute, so it would need to be converted to radians per second if we wish to report power in Watts. Given that Power stays constant (and assuming torque and Revs are independent), there is a trade off between Torque and Revs. The same amount of power can be created with high revs and low torque as compared to low revs and high torque. In other words you can have a large force over a small distance or a small force over a large distance, if they both happen in the same amount of time, they produce the same power. So the phrase, 'There is no replacement for displacement' is not 100% correct. However, since torque and Revs are not independent in engines, there is a big benefit to having high displacement when accelerating at the low speeds. Higher amounts of 'low end torque' resulting from high displacement gas engines, torque from an electric motor, or diesel engines results in a quicker acceleration when starting from 0 velocity.
Toque Varies with RPM:
Car manufacturers report torque at a specific rpm, usually at a very rpm if it is a gasoline engine. This is misleading because torque varies at different RPMs. Diesel and electric engines have high high torque at low RPMs which is why they can accelerate faster than gasoline cars. Diesel engines are not designed to have high RPMs whereas gasoline engines can rev at high rpms and therefore can have higher peak horsepower, BUT the gasoline car cannot accelerate as fast at low speeds and cannot pull large loads. Diesel engines reach their peak horsepower and lower RPMs. Gasoline engines reach peak horsepower at high RPMs which allows them to accelerate more quickly at high speeds. This is one reason why tow trucks typically have diesel engines and race cars have gasoline engines. Diesel engines must be built to withstand high pressures and torque. Therefore diesel engines are more expensive, but last longer.
Conservation of Energy:
Ideally, all chemical energy produced by an engine become linear kinetic energy of the car. However some chemical energy is lost as heat or rotational kinetic energy if the pistons, crank shaft, tire rims, or drive shaft have high moments of inertia.
Mechanical advantage. A screw driver is an example of a compound gear. Torque=F*r as a twisting force or torque = Newtons*meters as energy in Joules. Torque as energy must remain constant. At the handle, the radius is larger compared to the screw bit. The handle has longer radius and therefore has a larger distance to travel, with a smaller force needed to twist. The screw bit end has the same angular velocity as the handle, but with a smaller radius it has a smaller distance to travel, therefore the force must go up in order for energy to remain constant. Energy (work as a force*distance) cannot be created or destroyed. The energy input (handle twist) must equal the energy output (bit twist).
Friction:
Kinetic friction is less than static, so when the rear wheels spin 'burn out' going around a corner the car experiences over steer. The mu in the friction equation all the sudden becomes lower. This is one reason why all wheel drive cars are better at handling than rear wheel drive cars. Rear wheel drive cars can decrease the likelihood of oversteer by adding a rear wing-this increases the normal force on the rear wheels at high speeds without adding weight to the car which would affect acceleration. Load is shifted forward when braking, so tap the brakes when under steer occurs --this increases force friction in the front tires by increasing normal force. Rear wheel drive cars experience a shift in load to the rear when it first accelerates, increases normal force in the rear which increases grip (force friction).
Lateral g's:
When cars round a corner, they experience lateral acceleration toward the center of the circular arc they are turning. This acceleration or force is measured in g's and is rarely greater than 1 G for everyday driving. The lateral g's can be calculated by taking centripetal acceleration (v^2/r where 'r' is the radius of curvature and 'v' is tangential velocity) and dividing by 'g' (aka 9.8 m/s/s). If the car engine has its center of mass between the front and rear axles, there will be less under steer in turns. If the center of mass is in front of the front axle, there will be a lot of under steer--can be explained by torque and the 'painters on the beam' problem.
Mid Engine Cars, Torque, and Traction (aka friction):
Mid engine cars distribute the weight (aka load) of the engine more evenly to the front and rear tires which results in equal traction to all tires. Equal traction means the car is less likely to spin out. Front engine cars do not distribute their load as evenly. This is analogous to the 'painters' on a beam torque problem. The Audi R8 is an example of a mid engine car. This car was featured in the first Iron Man movie.
Ackerman Steering
Each wheel of a car has the same angular velocity but different tangential velocities because each tire's path has a different radius of curvature.
Acceleration is proportional to Power/(Mass*Velocity). Greater power leads to greater acceleration; greater mass leads to less acceleration; and acceleration is lower at higher velocities. This equation can be derived by setting two equations equal to one another and solving for 'a': F = P/V and F = m*a. Cars may be classified by their power to weight ratios. Weight is simply the mass of the vehicle multiplied by the acceleration of gravity which is 9.8 m/s/s on planet earth. The weight to power ratio can be expressed as a fraction: (Weight/Power). Cars with a ratio lower than 10 are considered super cars. Sometimes people use the power to weight ratio instead of weight to power, but the overall logic is the same. The Koenigsegg ONE: 1 has nearly a 1:2 ratio with 1341 horsepower and 2998 lbs of curb weight with a top speed of 273 mph. The ONE:1 is power to weight ratio in Horsepower to kilograms rather than horsepower to american pounds of weight.
When accelerating at low speed, the weight to power ratio is the most important factor. Two cars with very different masses, but the same power to weight ratio will accelerate at the same speeds when initial speed is low. As speed increases, traction limited grip plays an increasingly important role. The lighter (less massive) car will accelerate more in mid range speeds because of the downward force from air increases its force normal (think friction equation which is the source of thrust forward) at a higher rate as compared to the heavier car. Both cars have the same increase in downward force from air because their overall shape is likely the same, but percentage by which force normal increases for the lighter car is greater as compared to the heavier car. Force thrust is equal to force friction which is mu*force normal.
At the very high end speeds, the heavier car will have greater acceleration than the lighter car. The net force on each of the cars is thrust (aka friction from the tires on the ground) minus drag. The drag on both cars is the same, however the thrust force is greater for the heavier car than the lighter car. The heavier car must have greater engine power if it achieved the same weight to power ratio as the lighter car. Therefore the drag affects the net force at differing rates when the lighter car has a greater overall decrease in its net force resulting in less acceleration. Students may need to draw a force diagram for both cars and think about newton's second law a = (net force)/mass to understand this at a deeper level.
Explaining Transmissions using P=force*velocity (aka linear kinematics):
Start with the formula a=(f/m) . Force and acceleration are directly proportional. Given the same mass, acceleration increases as force increases. For example, doubling force leads to double the acceleration. Second, consider the power equation Power=Force*Velocity and apply it to gears in a transmission. The V represents tangential velocity of a gear (not the angular velocity). For simplicity we will assume the power of an engine remains constant, therefore as we apply the formula power will stay the same while force and velocity vary inversely.
Linearly Linked Gears. Each gear in a linearly linked set of gears will have the same power (measured in horsepower or watts). If the gears are linearly linked, each gear (regardless of radius) travels at the same tangential velocity although angular velocities will vary. If tangential velocity remains constant, then the force exerted by each gear also remains unchanged. However, if you arrange the gears in compound fashion, you can vary the tangential velocity of one of the compounded gears which inversely effects force. In a transmission there is always an input and output shaft connected to the two gears that are linearly linked, these shafts are a form of compound gear.
Compound Gears. The two adhered gears that comprise a compound gear have the same angular velocity, but they differ in tangential velocities. In a compound gear, the larger gear has greater tangential velocity and less force as compared to the smaller gear to which it is adhered. By compounding two gears and keeping power constant, you can increase the tangential velocity of a gear by a certain factor and thereby reduce its force by that same factor. Compound gears can be arranged such that the power input first enters a large gear and is transferred to a smaller gear to which it is adhered--this results in more force but less velocity. For example, since power is constant, cutting the velocity in half of a a gear by compounding two gears with ration 1:2 results twice the force or P=(1/2*V)*(2*F). Compound gears can also be arranged such that the power input first enters a small gear and is transferred to a larger gear to which it is adhered--this results in less force but more velocity. An example of this would be doubling the velocity of a gear by compounding two gears with ratio 2:1 which results in half the force or P=(2*V)*(1/2*F).
Three scenarios:
Scenario 1: A large gear is linearly linked to a large gear compounded with a small gear results in lower velocity, but greater force. Due to the smaller radius of the compounded gear, the velocity is smaller (smaller circumference distance traveled in the same time) but the force is greater.
Scenario 2: A large gear is linearly linked to a large gear which is in turn linearly linked to a third large gear (tangential velocities remain constant for all gears) .
Scenario 3: A large gear is linearly linked to a small gear compounded to a large gear results in higher velocity, but less force. Due to the larger radius of the compounded gear, the velocity is larger (larger circumference distance traveled in the same amount of time).
Internal combustion engines have a limited RPM (RPM is the same as angular velocity). Transmissions begin with Scenario 1 to maximize acceleration. However, when acceleration is high due to a large force, the engine will reach its maximum RPM very quickly. Scenario 2 is the next transmission stage where the RPM of the engine is the same as the velocity of the gears. Scenario 3 occurs at higher speeds when force is still desired so as to continue accelerating the car; only a small amount of force is available due to the RPM limit of the engine. However, some force is better is no force. Ideally, if there were no RPM limit on an engine, we would always want scenario 1 such that force and acceleration are high.
Torque can have several meanings depending upon the context (or equation) due to its unit: force*displacement. The displacement could be either the lever arm length (when torque is the twisting force type) or the distance over which a force is applied (when torque is the energy type). The units of torque are Nm (energy), Nm (twisting force), foot*pounds (energy), or pound*feet (twisting force). Car magazines report torque as the twisting force type along with an rpm range in which that torque remains relatively constant. Pound*foot and Nm represent torque as a twisting force: one Newton (or lb) of force is applied perpendicular to a lever at a displacement of one meter (or foot) from the fulcrum. No movement is necessary if considering torque as only a twisting force. Movement is necessary when torque is used to describe energy or work. The unit foot*pound and Nm represents torque as work. Only a few times have I seen Torque used to describe the total energy of one combustion cycle in Joules rather than the number of newtons applied over one meter of displacement.
Work is the same as energy and is measured in Joules which also has unit of Nm or foot*pound. Work (f*d) can have the same unit of Nm or foot*pound. The term 'torque' is also used as a unit of work (aka energy measured in Joules), specifically describing the amount of work performed during one combustion cycle. The fly wheel or crank shaft travels 360 degrees (6.28 radius or radians) in one combustion cycle, torque (a certain number of lbs applied for 1 foot) must be multiplied by 6.28 feet (the total circumference of an imaginary fly wheel of radius one foot) in order to determine the total energy of a single combustion cycle. Energy divided by time is power. If you multiply the total energy of one cycle by the number of cycles occurred (revolutions) you get total energy. If you then divide that total energy by the time (per minute) it took for the number of cycles to occur, you have E/t which is power. To get specifically 'horsepower' by multiplying torque and rpm, you must also multiply by a constant (1/5252). Torque (the energy type in units of foot*lbs) multiplied by RPM (revolutions per minute) multiplied by the constant (1/5252) is equal to units of horse power. One horsepower is equal to 33000 ft*lbs/minute, so HP=(Torque*RPM*6.28)/33,000 is the same as HP=(Torque*RPM)/5252. Remember that 1 Nm is equal to 1 Joule. Torque (the energy type in units of Nm or Joules) multiplied by RPS (revolutions per second) multiplied by 6.28 is equal to power in units of watts. Torque in this context should really be called Work or Energy with units of Joules. RPM is an angular velocity. When speaking of linear speed, the formula is instead power= force*velocity. An engine A with 150 Nm at 9000 rpm has the same power as an engine B with 300 Nm at 4500 rpm. Gearing can be used with either engine A or B in order to produce any desired torque / rpm ratio.
Given that the power of an engine stays constant, you want maximum force (and as a result minimal velocity) to produce maximum acceleration when a car begins at rest. In the 3D animation of transmission they do a good job using the area under a force v. distance graph to show that total energy stays the same even though there is a give and take trade off for force and distance. Don't forget that transmissions only work if there is a compound gear involved; a tire connected to an axle with a single gear is a compound gear or a compound is simply a gear joined to the input or output shaft.
Power transfer in gears can also be thought of using the Power = Torque * Revs equation where Revs is a measure of angular velocity. More on this equation further down in this reading.
Explaining Transmission with Power = Torque*Angular Velocity (aka angular kinematics):
Power = torque*angular velocity. The torque in this equation is the 'twisting force' type of torque. This is the same formula as Power=force*velocity. Be careful to note that the 'speed' is in angular speed and not tangential. Tangential speed is equal to angular speed multiplied by the radius. This follows: (torque)*(angular velocity) = (Force*r)*(angular velocity) = (Force)*(r*angular velocity) = (Force)*(tangential velocity). Omega (which looks like a lower case w) is the symbol typically used to represent angular velocity. This equation may make transmission and gears easier for students to understand once we have covered rotational kinematics. Keep in mind that the power of the system remains constant. For the same amount of power output, a diesel engine can spin at lower rpm because it has more torque, as compared to a gasoline engine which has low torque and must spin at a higher rpm. However, power output of an engine ultimately determines speed. Different gear ratios can be used to get the power to the wheels regardless of the whether torque or rpm is higher. The new mustangs have less torque but higher rpm than the new Camaros, which results in greater power. The 2016 mustang can beat the 2015 camaro in a drag race. Cars with low amounts of torque that can sustain high RPMs can compete against cars with high amounts of torque that cannot sustain high RPMs. Gearing allows for torque and RPM (aka angular velocity) to vary inversely for the same engine.
In order to simplify the explanation of transmission, we have assumed that the amount of power produced by the engine remains constant through all ranges of RPM. However, in reality, the amount of power produced by an engine is not constant as RPM increases. Torque changes when rpm changes, but not as a perfect tradeoff as expressed by power = torque*angular velocity. Engines have an upper-bound on rpm because it is difficult to achieve the same power at higher RPMs as compared to lower RPMs. The typical range of RPM is 2000 to 6000 in order to maintain a relatively constant engine output of power. Since toque varies with RPM and torque should be reported along with a specific range of rpm. rpm is that of the engine before any transmission is involved which will lead to a trade offs of the RPM of a gear and the torque of the gear depending upon the need of the vehicle.
Mechanics may try to tune a car such that the torque remains constant independent of RPM. On the dyno output, Torque (energy as lbs of force*distance of 1 ft) and Horsepower always cross at 5252 when units of RPM are used on the x-axis and Torque/Horsepower (usually torque units are on the left, hp units are on the right) are placed on the y-axis. Torque/5252 is the slope of the horsepower curve. The dyno allows the car wheels to accelerate a solid cylinder which determines Torque (Torque = angular acceleration * moment of inertia). Tuners want to flatten the torque curve so as to achieve the maximum area under the curve (which is a measure of power). If Torque (the twisting force kind) were to remain constant, RPM would be directly proportional to power. If an ideal engine doubled RPM, the engine would have double power. Maximum RPM would lead to maximum power output of the engine.
Another way to view the power and torque relationship is with Power = Torque * Revs where Revs is a measure of angular velocity. Torque increases (varies directly) with the 'displacement' of an engine. Displacement is simply the total volume of the the cylinders where the gas/air mixture combustion occurs. Revs are usually measured in revolutions per minute, so it would need to be converted to radians per second if we wish to report power in Watts. Given that Power stays constant (and assuming torque and Revs are independent), there is a trade off between Torque and Revs. The same amount of power can be created with high revs and low torque as compared to low revs and high torque. In other words you can have a large force over a small distance or a small force over a large distance, if they both happen in the same amount of time, they produce the same power. So the phrase, 'There is no replacement for displacement' is not 100% correct. However, since torque and Revs are not independent in engines, there is a big benefit to having high displacement when accelerating at the low speeds. Higher amounts of 'low end torque' resulting from high displacement gas engines, torque from an electric motor, or diesel engines results in a quicker acceleration when starting from 0 velocity.
Toque Varies with RPM:
Car manufacturers report torque at a specific rpm, usually at a very rpm if it is a gasoline engine. This is misleading because torque varies at different RPMs. Diesel and electric engines have high high torque at low RPMs which is why they can accelerate faster than gasoline cars. Diesel engines are not designed to have high RPMs whereas gasoline engines can rev at high rpms and therefore can have higher peak horsepower, BUT the gasoline car cannot accelerate as fast at low speeds and cannot pull large loads. Diesel engines reach their peak horsepower and lower RPMs. Gasoline engines reach peak horsepower at high RPMs which allows them to accelerate more quickly at high speeds. This is one reason why tow trucks typically have diesel engines and race cars have gasoline engines. Diesel engines must be built to withstand high pressures and torque. Therefore diesel engines are more expensive, but last longer.
Conservation of Energy:
Ideally, all chemical energy produced by an engine become linear kinetic energy of the car. However some chemical energy is lost as heat or rotational kinetic energy if the pistons, crank shaft, tire rims, or drive shaft have high moments of inertia.
Mechanical advantage. A screw driver is an example of a compound gear. Torque=F*r as a twisting force or torque = Newtons*meters as energy in Joules. Torque as energy must remain constant. At the handle, the radius is larger compared to the screw bit. The handle has longer radius and therefore has a larger distance to travel, with a smaller force needed to twist. The screw bit end has the same angular velocity as the handle, but with a smaller radius it has a smaller distance to travel, therefore the force must go up in order for energy to remain constant. Energy (work as a force*distance) cannot be created or destroyed. The energy input (handle twist) must equal the energy output (bit twist).
Friction:
Kinetic friction is less than static, so when the rear wheels spin 'burn out' going around a corner the car experiences over steer. The mu in the friction equation all the sudden becomes lower. This is one reason why all wheel drive cars are better at handling than rear wheel drive cars. Rear wheel drive cars can decrease the likelihood of oversteer by adding a rear wing-this increases the normal force on the rear wheels at high speeds without adding weight to the car which would affect acceleration. Load is shifted forward when braking, so tap the brakes when under steer occurs --this increases force friction in the front tires by increasing normal force. Rear wheel drive cars experience a shift in load to the rear when it first accelerates, increases normal force in the rear which increases grip (force friction).
Lateral g's:
When cars round a corner, they experience lateral acceleration toward the center of the circular arc they are turning. This acceleration or force is measured in g's and is rarely greater than 1 G for everyday driving. The lateral g's can be calculated by taking centripetal acceleration (v^2/r where 'r' is the radius of curvature and 'v' is tangential velocity) and dividing by 'g' (aka 9.8 m/s/s). If the car engine has its center of mass between the front and rear axles, there will be less under steer in turns. If the center of mass is in front of the front axle, there will be a lot of under steer--can be explained by torque and the 'painters on the beam' problem.
Mid Engine Cars, Torque, and Traction (aka friction):
Mid engine cars distribute the weight (aka load) of the engine more evenly to the front and rear tires which results in equal traction to all tires. Equal traction means the car is less likely to spin out. Front engine cars do not distribute their load as evenly. This is analogous to the 'painters' on a beam torque problem. The Audi R8 is an example of a mid engine car. This car was featured in the first Iron Man movie.
Ackerman Steering
Each wheel of a car has the same angular velocity but different tangential velocities because each tire's path has a different radius of curvature.
Weight to Power Ratio
Weight to Power Ratio. Acceleration is proportional to Power/(Mass*Velocity). Greater power leads to greater acceleration; greater mass leads to less acceleration; and acceleration is lower at higher velocities. This equation can be derived by setting two equations equal to one another and solving for 'a': F = P/V and F = m*a. Acceleration is also directly proportional to torque*constant/mass when the gear remains constant.